FZL300型CBTC系统采用移动闭塞控制方式,基于连续的、高速的车地双向通信,不断地将列车的移动信息发给地面区域控制中心,区域控制中心根据得到每一列车连续的位置信息和列车其它运行信息,并据此计算出每一列车的移动授权,并不断动态更新,发送给列车。列车根据接收到的移动授权和自身的运行状态计算出列车运行的速度曲线,车载ATP保证列车在该速度曲线下运行,当列车的速度超过允许速度控制曲线时,对列车实施安全制动控制。ATO子系统在ATP子系统保护下,控制列车的牵引、巡航、惰行及制动。FZL300型CBTC系统结构图如下:
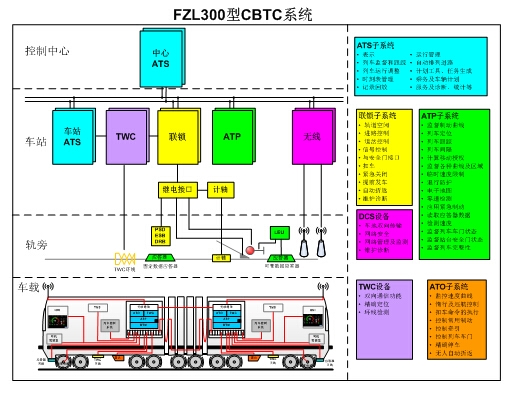
FZL300型CBTC系统结构框图
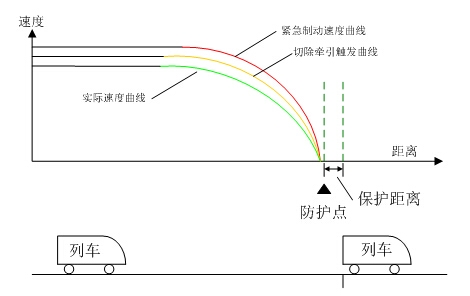
移动闭塞的列车安全间隔是按后行列车在当前速度下所需要的制动距离,加上制动延迟距离和列车保护距离来计算的。列车保护距离是后行列车的目标点和危险点之间的一个固定距离,该距离是在考虑了一系列最不利条件下仍能保证列车安全间隔的基础上确定的。为此,引入了相对模式的概念,即不考虑先行列车的速度,而主要考虑其列车位置的处理方式。移动闭塞原理如下图所示。
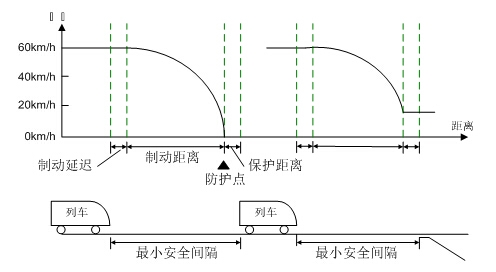
当然,基于通信的列车自动控制系统CBTC既可以实现固定闭塞、准移动闭塞,也可以实现移动闭塞。中国通号集团的FZL300型CBTC系统采用移动闭塞方式,目标距离-速度控制方式,采用相对位置模式,后续列车以前行列车占用的最小安全后端作为追踪目标点。
车载ATP子系统的测速测距功能通过测速设备实现。车载ATP考虑采用测速传感器结合雷达的方式进行测速测距。其中,通过测速传感器获得的脉冲信息,车载ATP计算走行距离及车辆速度,进而实现列车定位和速度监控。雷达测速作为辅助方式。车载ATP定位功能的任务是检测并维护列车在线路上的位置。对于定位的描述方法为:车辆位于某段轨道区段的某偏移量处。同时,车载定位功能需要确定列车在极端情况下的位置,包括测量不确定性。车载定位基于连续速度测量、应答器检测和电子地图信息。
车载定位功能确定列车前端和后端的安全相关和非安全相关位置。列车利用区段定位其在电子地图中的位置,绝对位置在(区段号,偏移量)坐标系统中规定。
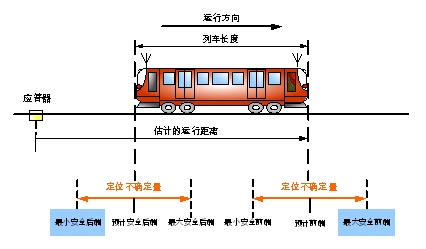
列车的安全和非安全位置
列车的非安全相关位置(预计的后/前端)定义为最有可能的位置,仅使用在车载子系统中。该位置的计算基于对不确定性的“最佳情况”估计。
在车载子系统(重新)启动后,列车位置是未知的,定位状态为“失去定位”。在检测到两个连续应答器,同时所测量的两个应答器之间的距离与电子地图相符之后,则定位状态将变为“定位”。步骤如下:检测第一个应答器用来确定电子地图中的应答器位置;第二个应答器的检测可以用来确定列车移动方向和列车前行方向与区段方向的关系。
由于连续的累加测速误差,位置不确定性将随着运行距离而增加。车载ATP设备需要设置最大位置不确定性。如果超过最大误差,列车定位状态将变为“失去定位”。应答器用于重新调整列车位置和将安全位置不确定性设置为一个基于信标测量误差的绝对值。
与FZL300型点式ATC系统比较,FZL300型CBTC系统中增加了FZL.W型无线通信子系统。轨旁增加了WAB无线接入箱作为轨旁无线通信设备,车载增加了TRU作为车载无线通信设备,WAB与TRU之间进行连续的无线通信,实现轨旁信息与车载信息不间断的交互功能。车载TRU主要由一个3U机笼构成,包含:一块电源板、一块监控板、两块交换机板、两个滤波盒、两个AP模块等。轨旁WAB包含两个轨旁AP模块、两个光电转换器、两个射频滤波、4个射频防雷、两个48伏电源模块、两个电源防雷、两个电源滤波模块等。
FZL.W型无线通信子系统主要技术指标:
不考虑网络拥塞的情况下,车地双方向通信的延迟要求控制在250毫秒以内;
车地双向传输带宽之和不能低于1Mbps;
车地双向中任意方向的丢包率应小于1%;
车载电台在无线覆盖区域内进行漫游切换时,要求切换时间在100ms以内;
FZL300型CBTC系统主要技术指标:
| 指标 |
IEEE标准推荐取值 |
FZL300型CBTC系统取值 |
| 单个轨旁ZC处理的最大列车数量 |
10-40列车 |
30列车 |
| 列车定位分辨率 |
±0.25m-±6.25m |
±0.02m |
| 非降级模式下,列车测距最大允许误差 |
±5m-±10m |
±10m |
| 未装备屏蔽门车站ATO停站定位精度 |
±0.25m |
±0.25m |
| 装备屏蔽门车站ATO停站定位精度 |
±0.05m |
±0.05m |
| 列车移动授权分辨率 |
±0.25m-±6.25m |
±0.02m |
| 列车ATP测速分辨率 |
±0.5km/h-±2km/h |
±0.1km/h |
| 列车ATP测速精度 |
±3km/h |
±3km/h |
| 列车速度控制命令分辨率 |
±0.5km/h-±5km/h |
±0.5km/h |
| 车到地的通信延迟 |
0.5s-2s |
0.5s |
| 地到车的通信延迟 |
0.5s-2s |
0.5s |
| 轨旁CBTC设备反应时间 |
0.07s-1s |
0.5s |
| 车载CBTC设备反应时间 |
0.07s-0.75s |
0.5s |
| 退行检测标准 |
0.5m-2m |
0.5m |
| 零速检测标准 |
<1km/h-<3km/h 持续2s |
<3km/h(2s) |
| 列车位置测量精度误差 |
|
<=±2% |
| 列车测速范围 |
|
0-150km/h |

车载TRU

轨旁WAB

FZL300型CBTC车载主机